Next: Calibration
Up: Methods
Previous: Methods
Image Acquisition
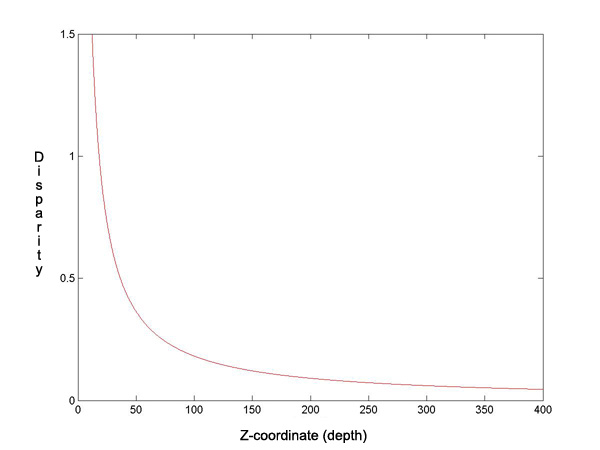
To capture the images, two Logitech Quickcam Express cameras are used. They have a resolution of 352 x 288 and use a CMOS sensor chip. Based on the curve seen in Figure 3.2, which shows the relation between disparity and depth in the case of a baseline ![]()
![]() with length equal to 5cm, the sensor chips are approximately 5cm translated in x-direction. One can see, that the difference in disparity in a distance range from 25cm to 100cm is almost linear, thus accurate depth values can be computed inside this range. The stereo geometry is almost parallel to avoid occlusions.
with length equal to 5cm, the sensor chips are approximately 5cm translated in x-direction. One can see, that the difference in disparity in a distance range from 25cm to 100cm is almost linear, thus accurate depth values can be computed inside this range. The stereo geometry is almost parallel to avoid occlusions.
 |
Other cameras could be used as well, but it must be verified that they can work simultaneously. Problems occurred with two cameras from Trust inc. Also cameras from different manufacturers can be used, but they should have the same properties (lens, sensor chip). The quality of the device has a strong influence on the results, especially with an intensity based approach, where intensities are directly compared.
To get a stable system, within which the result of the calibration remains usable, even if they are moved, the cameras have been cast in eproxy resin. The focus of the camera can be manually adjusted, but seems not to be very accurate. The fine-tuning was done using the results of calibration to decide whether the focal length of both cameras is approximately the same. The connection between the cameras and the computer is established via USB. Both cameras have a maximum frame rate of 30Hz. Each frame is transferred sequentially, so a maximum frame rate of 15Hz can be reached. The sequential dataflow implicates that the images are not taken at exactly the same time. In a professional stereo system it should be proved, that the capturing of the images is done simultaneously. Otherwise errors in depth values can occur, due to the movement of objects or the camera system in between the acquisition of a stereo pair.
Figure 3.3 shows the field of view of two Omnivision cameras,
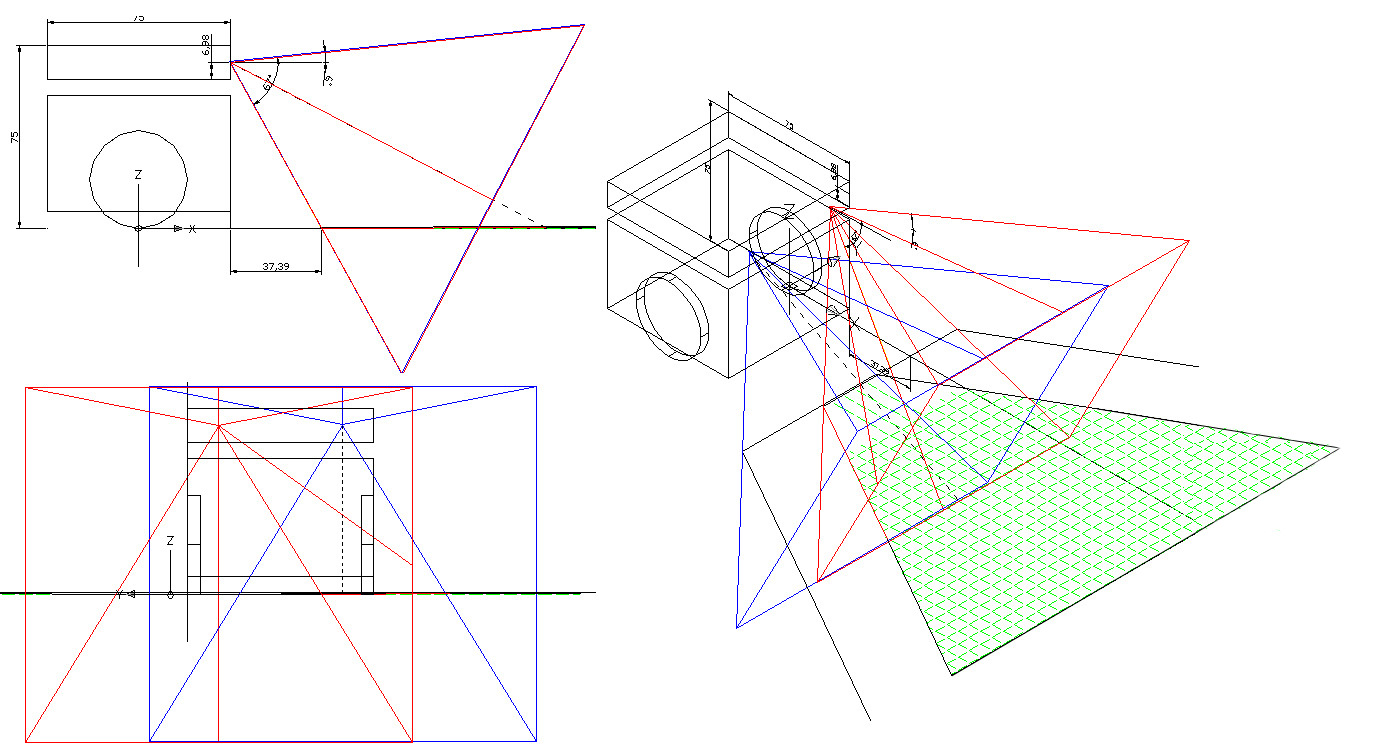 |
which will be used on the Tinyphoon robot3.2. The baseline has a length of 5cm. They have a viewing angle of 67![]()
![]() and a focal length of 3.5mm. The angle between the horizontal and the optical axis of the camera is given by 27
and a focal length of 3.5mm. The angle between the horizontal and the optical axis of the camera is given by 27![]() . This is optimal in the case of a football playing robot, especially in the MiroSot league, because the robots are not allowed to have a height higher than 8cm. Also the football field is not much higher, so everything that should be seen by the robot is within its field of view. The robot will be able to see things which are more than 37.9mm3.3 away from the camera.
. This is optimal in the case of a football playing robot, especially in the MiroSot league, because the robots are not allowed to have a height higher than 8cm. Also the football field is not much higher, so everything that should be seen by the robot is within its field of view. The robot will be able to see things which are more than 37.9mm3.3 away from the camera.
Next: Calibration
Up: Methods